
کاوشگر قمری اسلیم ژاپن که اخیرا پرتاب شده است یک کاوشگر کوچک دیگر نیز به همراه دارد که برای گرفتن عکس از فرودگر اسلیم روی ماه حرکت میکند و به دور خود میچرخد.
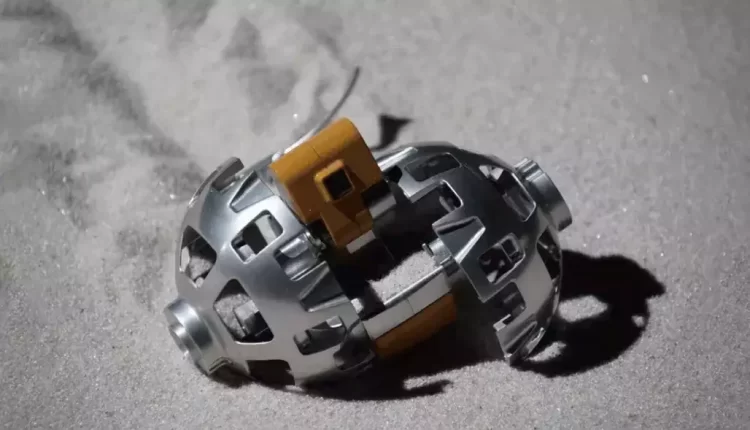
این کاوشگر که LEV-2 (سرواژه Lunar Excursion Vehicle 2) نام دارد یک کره فلزی کوچک بوده که خیلی بزرگتر از یک توپ تنیس نیست. LEV-2 هنگامی که بر روی ماه قرار میگیرد، از فرودگر اسلیم (SLIM) خارج میشود و دو نیمه خود را برای پیمایش خاکپوشه (Regolith) ماه تغییر میدهد.
در همین رابطه بخوانید: شگفتیهای ماه، تنها قمر زمین
فضاپیمای نسبتا کوچک اسلیم طی سه تا چهار ماه به مدار قمر زمین خواهد رسید و طی یک ماه محل فرود خود که دهانه شیولی (Shioli) است را بررسی خواهد کرد.
کاوشگر LEV-2
با فرض اینکه فرود SLIM طبق برنامه پیش برود، LEV-2 از فرودگر در ارتفاع تقریبی ۱.۸ متر بالاتر از سطح ماه رها میشود و شروع به چرخیدن برای تصویربرداری از فرود SLIM و منطقه اطراف میکند. انتظار میرود باتری کاوشگر LEV-2 حدود دو ساعت دوام بیاورد.
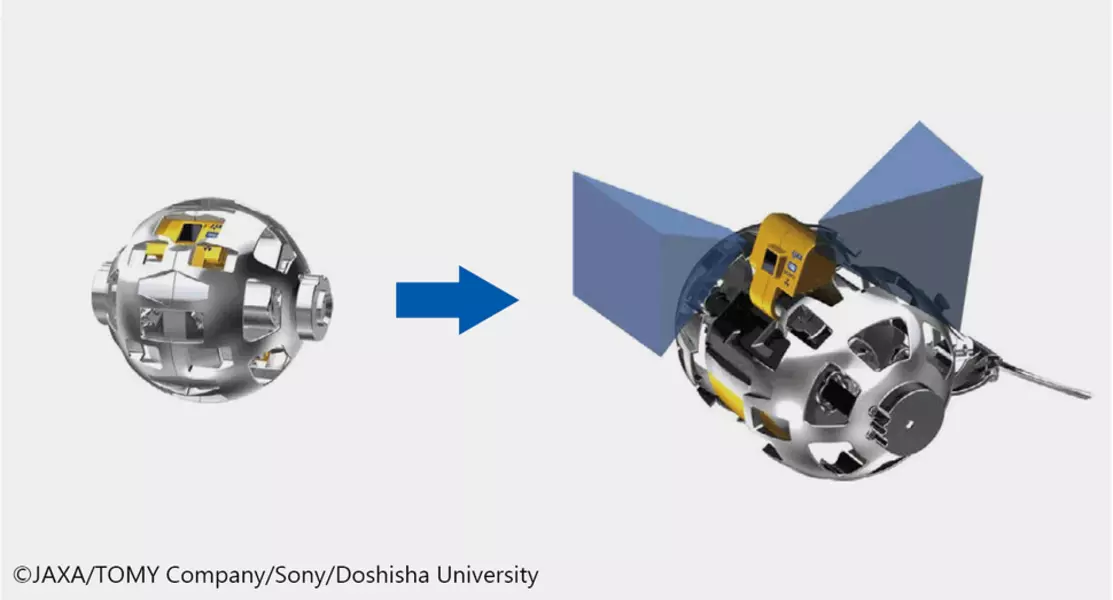
هنگامی که دو نیمه LEV-2 از هم جدا میشوند، به عنوان پایه و چرخ عمل میکنند تا کاوشگر کوچک بتواند در اطراف حرکت کند. بین دو نیمه، دو دوربین و یک تثبیتکننده برای کمک به LEV-2 در جهتیابی اطراف خود قرار دارند. LEV-2 دادههای خود را از طریق LEV-1 به زمین ارسال میکند. LEV-1 یک کاوشگر مجزا است که روی SLIM واقع شده است و همزمان با SLIM و LEV-2 عمل میکند.
کاوشگر ۲.۴ متری و ۲۰۰ کیلوگرمی اسلیم برای کاوش دهانهها و عارضهنگاری ماه با استفاده از فناوریهایی مشابه آنچه در سامانههای تشخیص چهره استفاده میشود، طراحی شده است. این کاوشگر همچنین مجهز به دوربین مخصوصی است که میتواند میزان آهن و سایر عناصر موجود در سنگهای سطح ماه را اندازهگیری کند. دادههای بهدستآمده توسط فضاپیمای مذکور به عنوان بخشی از برنامه آرتمیس (Artemis) ناسا استفاده خواهد شد.
فرودگر هوشمند قمری SLIM آژانس فضایی ژاپن (JAXA) در صورت موفقیت اولین فرود نرم این کشور بر ماه را رقم خواهد زد. این فضاپیما در ۶سپتامبر به همراه ماهواره XRISM به وسیله حامل فضایی H-2A پرتاب شد.