
نقشههای ماهوارهای سانتیمتری از شهرها راه را به رباتهای خودران نشان میدهند
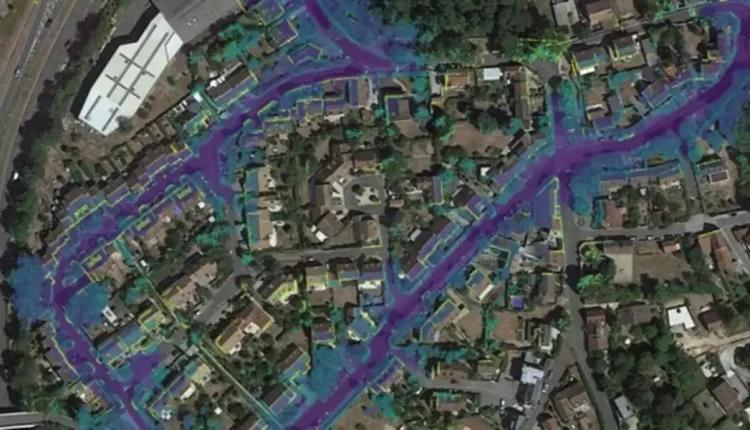
تعیین موقعیت دقیق از بزرگترین مشکلات رباتهای خودران برای حرکت در سطح شهرها است؛ چرا که تهیه نقشههای دقیق در حد سانتی متر از کل یک شهر، با فناوریهای فعلی بسیار پر هزینه است، اما به نظر میرسد با نرم افزار جدید شرکت فرانسوی اکسویز این مسئله، حل شده است.
در همین رابطه بخوانید: دانلود تصاویر ماهوارهای با کیفیت
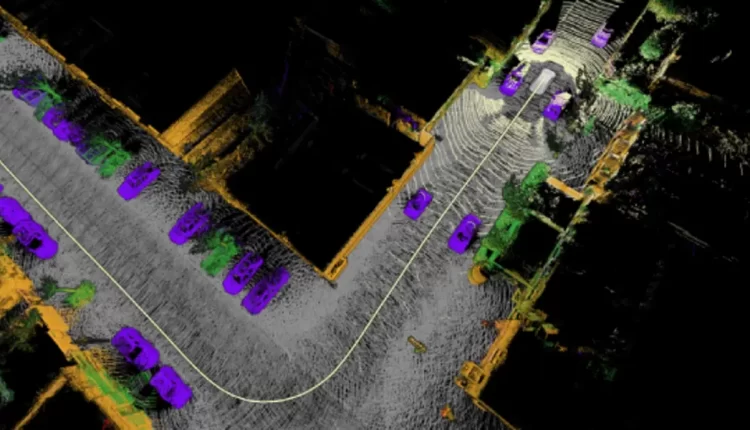
این شرکت با یکپارچهسازی سامانه ماهوارهای موقعیتیابی جهانی و حسگرهای لیدار (Lidar) بدون نیاز به سختافزار اضافی، در نرمافزار جدید خود با نام نرمافزار نقشهبرداری ۳ بعدی اکسویز (Exwayz 3D Mapping) به راه حلی بسیار ارزان برای ایجاد ابر نقاط سه بعدی در مقیاس شهر و مختصات جهانی دست یافته است. ابر نقاط مجموعه سه بعدی از نقاط است که خصوصیات سطح خارجی یک شی را توصیف میکنند. این نرمافزار میتواند با سامانههای لیدار و GNSS کار کند و نقشههای جغرافیایی با دقت تا ۲ سانتیمتر از شهرها، سایتهای صنعتی، بنادر و غیره ایجاد کند.
سامانه ماهوارهای ناوبری جهانی (GNSS) به گیرندههای کوچک اجازه میدهند تا موقعیت خود را با خطای چند متری مشخص کنند. لیدار نیز یکی از فناوریهای سنجش از راه دور است که با تاباندن لیزر به هدف و تجزیهوتحلیل نور بازتابشده، فاصله را اندازه میگیرد. یکپارچگی GNSS و حسگرهای مقرون بهصرفه لیدار، درهای جدیدی را برای نقشهبرداری با دقت بالا با هزینه کم باز کرده است.
Exwayz 3DM مستقیما از دادههای لیدار برای تولید ابرهای مذکور استفاده میکند و برای اطمینان از دقت با اطلاعات GNSS یکپارچه میکند. یکی دیگر از ویژگیهای Exwayz 3DM ادغام یکپارچه چندین نقشه بهدستآمده از دفعات مختلف جمعآوری دادهها است.
ماهوارهها چشم بینای رباتهای خودران
این نرمافزار در حوزه حملونقل صنایع مختلف کاربرد گستردهای دارد. تعداد روباتهای متحرک خودکار (AMR سرواژه Autonomous Mobile Robots) که صنعت تا ۲۰۳۰ هر سال به آنها نیاز دارد، ۱۰۰ میلیون تخمین زده شده است. این روباتها برای تحویل، حملونقل، لجستیک و بازرسی صنعتی استفاده میشوند. اولین چالشی که در رابطه با آنها باید بر آن غلبه کرد، ارائه موقعیت دقیق ربات بوده که نرمافزار Exwayz 3DM وارد عمل میشود و با نقشهبرداری دقیق به ناوبری در محیط عملیاتی حیاتی کمک میکند.
روباتهای متحرک خودکار برای انجام وظایف مختلف در محیطهای گوناگون و بدون نیاز به کنترل انسانی طراحی و استفاده میشوند. این روباتها با استفاده از ترکیبی از حسگرها، الگوریتمها و سامانههای هوش مصنوعی قادر به شناسایی محیط، تصمیمگیری، ناوبری و انجام وظایف خاصی هستند.